☕移植篇:CAN配置
info
硬件:STM32F407开发板,CAN调试器,ST—LINK调试器
使用CUBEMX创建工程
选用外部高速晶振
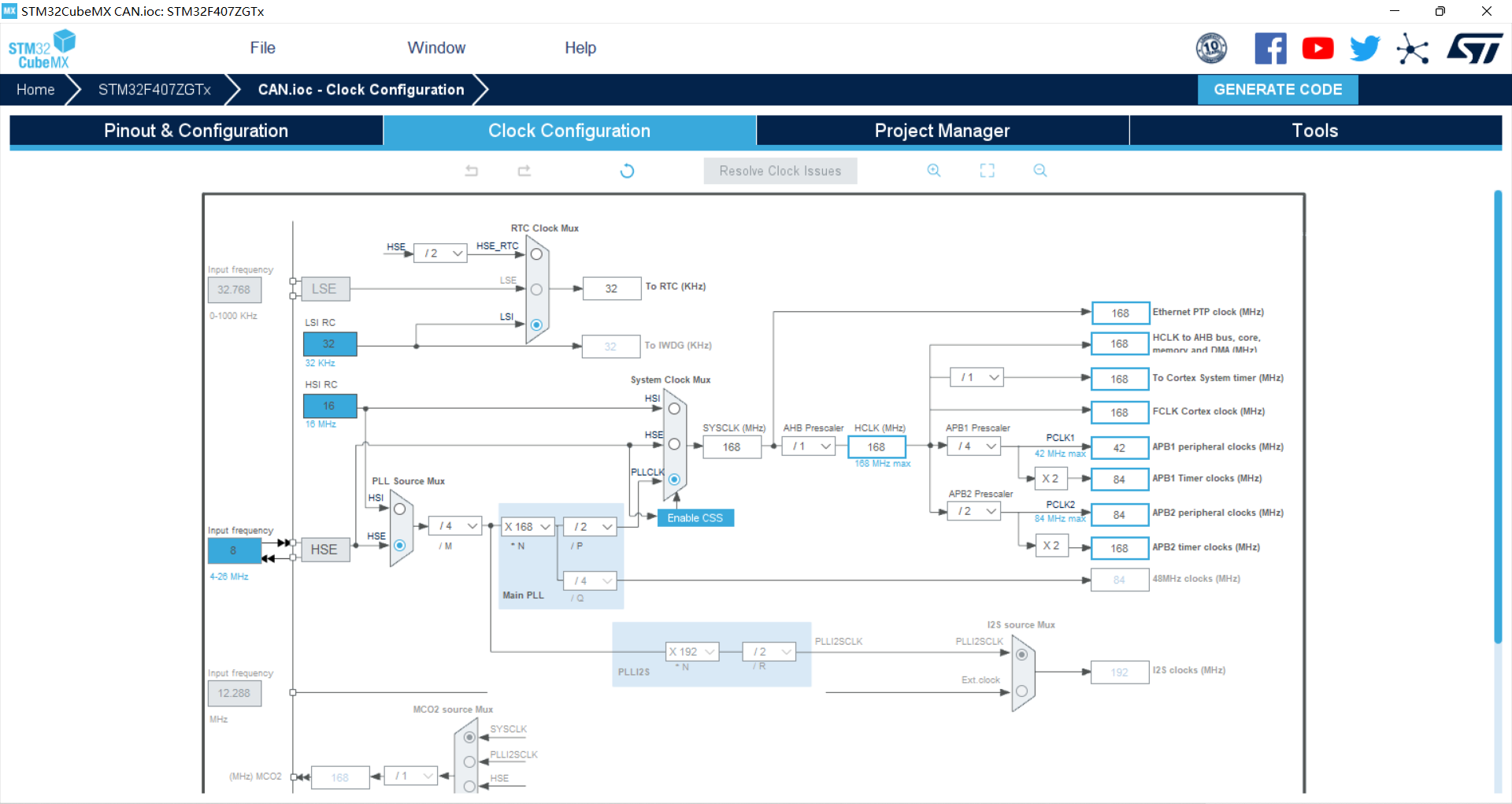
配置时钟树
HCLK一般为默认最高,CAN使用的是APB1外设时钟。选择时钟源,输入需要的频率按回车即可自动调整其他参数
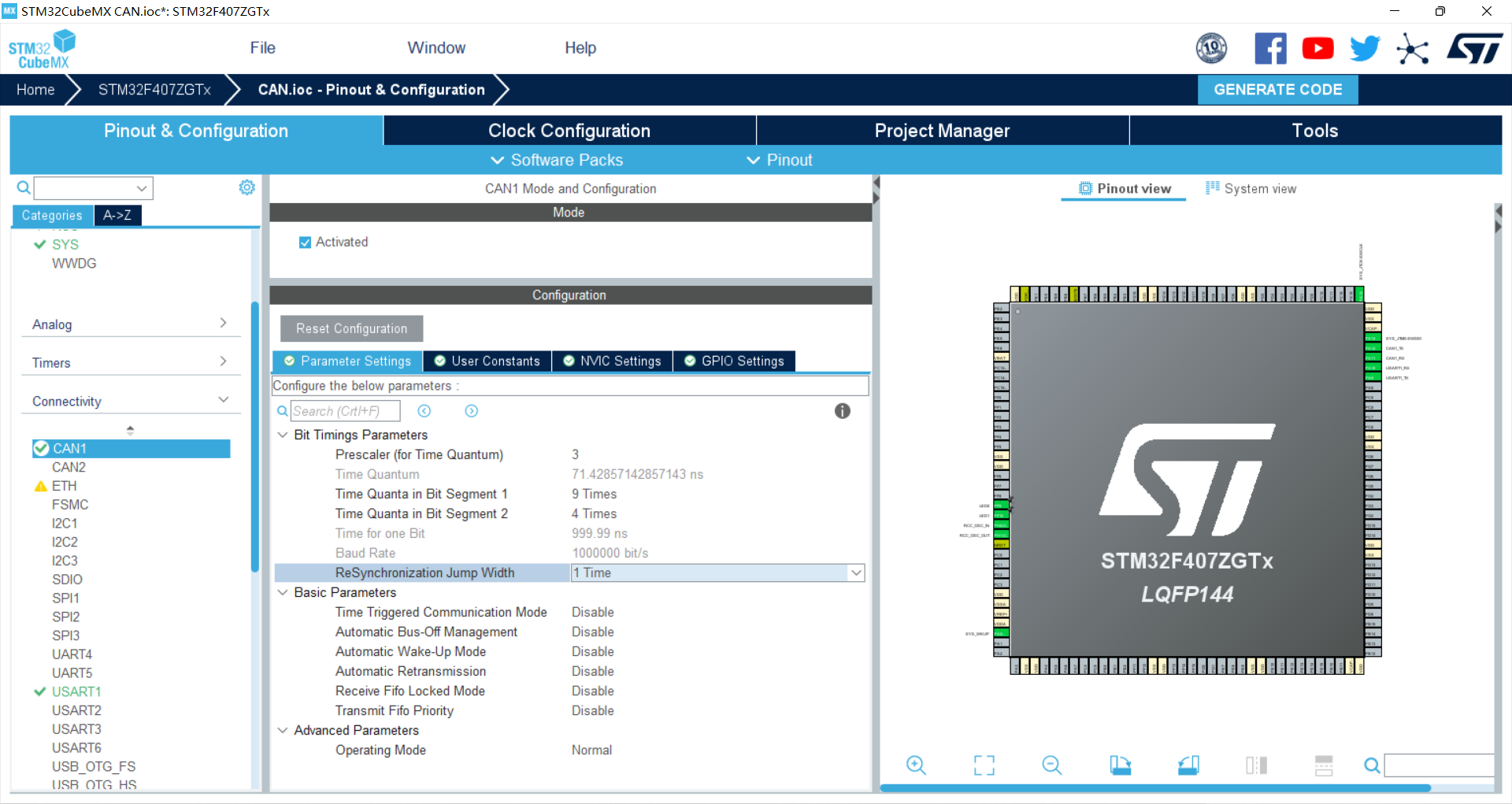
配置CAN
使能后需要根据波特率对参数进行调整,当然也可以在程序中修改。
上图中可见APB1为42MHz,经过下图中预分频之后 42/3 = 14MHz。
如果我们希望得到1MHz波特率,那只需满足Jumpwidth+seg1+seg2= 14MHz / 1MHz = 14即可,其他波特率以此类推,也可以使用代码块实现波特率的配置。
#if defined (SOC_SERIES_STM32F1)/* APB1 36MHz(max) */
static const struct stm32_baud_rate_tab can_baud_rate_tab[] =
{
{CAN1MBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 3)},
{CAN800kBaud, (CAN_SJW_2TQ | CAN_BS1_5TQ | CAN_BS2_3TQ | 5)},
{CAN500kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 6)},
{CAN250kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 12)},
{CAN125kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 24)},
{CAN100kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 30)},
{CAN50kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 60)},
{CAN20kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 150)},
{CAN10kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_3TQ | 300)}
};
#elif defined (SOC_SERIES_STM32F4)/* APB1 42MHz(max) */
static const struct stm32_baud_rate_tab can_baud_rate_tab[] =
{
{CAN1MBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 3)},
{CAN800kBaud, (CAN_SJW_2TQ | CAN_BS1_8TQ | CAN_BS2_4TQ | 4)},
{CAN500kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 6)},
{CAN250kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 12)},
{CAN125kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 24)},
{CAN100kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 30)},
{CAN50kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 60)},
{CAN20kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 150)},
{CAN10kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_4TQ | 300)}
};
#elif defined (SOC_SERIES_STM32F7)/* APB1 54MHz(max) */
static const struct stm32_baud_rate_tab can_baud_rate_tab[] =
{
{CAN1MBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 3)},
{CAN800kBaud, (CAN_SJW_2TQ | CAN_BS1_9TQ | CAN_BS2_7TQ | 4)},
{CAN500kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 6)},
{CAN250kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 12)},
{CAN125kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 24)},
{CAN100kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 30)},
{CAN50kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 60)},
{CAN20kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 150)},
{CAN10kBaud, (CAN_SJW_2TQ | CAN_BS1_10TQ | CAN_BS2_7TQ | 300)}
};
#endif
生成代码并运行试车
cubemx生成的默认代码只有初始化can的代码,开启can以及发送接收函数均需要自己编写,这部分可参照*_hal_can.c中提供的接口,也可以从网上直接copy,以下来自正点原子
void CAN_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
/*##-2- Configure the CAN Filter ###########################################*/
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank = 14;
if (HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
while(1)
{
}
}
/*##-3- Start the CAN peripheral ###########################################*/
if (HAL_CAN_Start(&hcan1) != HAL_OK)
{
/* Start Error */
while(1)
{
}
}
/*##-4- Activate CAN RX notification #######################################*/
if (HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK)
{
/* Notification Error */
while(1)
{
}
}
/*##-5- Configure Transmission process #####################################*/
TxHeader.StdId = 0x321;
TxHeader.ExtId = 0x01;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.IDE = CAN_ID_STD;
TxHeader.DLC = 2;
TxHeader.TransmitGlobalTime = DISABLE;
}
u8 CAN1_Send_Msg(u8* msg,u8 len)
{
u8 i=0;
u32 TxMailbox=0;
u8 message[8];
TxHeader.StdId=0X12; //
TxHeader.ExtId=0x12; //
TxHeader.IDE=CAN_ID_STD; //使用标准帧
TxHeader.RTR=CAN_RTR_DATA; //
TxHeader.DLC=len;
for(i=0;i<len;i++)
{
message[i]=msg[i];
}
if(HAL_CAN_AddTxMessage(&hcan1, &TxHeader, message, &TxMailbox) != HAL_OK)//·¢ËÍ
{
return 1;
}
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan1) != 3) {}
return 0;
}